#include <Occurrences.hh>
Public Types | |
| typedef std::vector < OccurrencePtr > ::const_iterator | const_iterator |
| typedef std::vector < OccurrencePtr >::iterator | iterator |
Public Member Functions | |
| OccurrencesImpl (double default_abundance) | |
| OccurrencesImpl (const std::string &label, const std::string &coord_system=GeoTransform::getDefaultCS()) | |
| ~OccurrencesImpl () | |
| OccurrencesImpl * | clone () const |
| void | reserve (int estimate) |
| char const * | label () const |
| char const * | coordSystem () const |
| bool | hasEnvironment () const |
| int | dimension () const |
| void | setLabel (const std::string &label) |
| void | setCoordinateSystem (const std::string &cs) |
| void | createOccurrence (const std::string &id, Coord longitude, Coord latitude, Scalar error, Scalar abundance, int num_attributes=0, Scalar *attributes=0, int num_env=0, Scalar *env=0) |
| void | createOccurrence (const std::string &id, Coord longitude, Coord latitude, Scalar error, Scalar abundance, std::vector< double > attributes, std::vector< double > env) |
| void | insert (const OccurrencePtr &) |
| iterator | erase (const iterator &it) |
| int | numAttributes () const |
| int | numOccurrences () const |
| bool | isEmpty () const |
| ConstOccurrencePtr | operator[] (int i) const |
| const_iterator | begin () const |
| const_iterator | end () const |
| iterator | begin () |
| iterator | end () |
| ConstOccurrencePtr | getRandom () const |
| void | getMinMax (Sample *min, Sample *max) const |
| void | normalize (Normalizer *normalizerPtr, size_t categoricalThreshold=0) |
| void | resetNormalization () |
| void | setEnvironment (const EnvironmentPtr &env, const char *type="Sample") |
| void | appendFrom (const OccurrencesPtr &source) |
| std::vector< ScalarVector > | getEnvironmentMatrix () |
| void | dump (std::string msg="") const |
| virtual ConfigurationPtr | getConfiguration () const |
| virtual void | setConfiguration (const ConstConfigurationPtr &) |
Private Member Functions | |
| void | initGeoTransform () |
Private Attributes | |
| double | default_abundance_ |
| std::string | label_ |
| std::string | cs_ |
| GeoTransform * | gt_ |
| std::vector< OccurrencePtr > | occur_ |
Friends | |
| class | ReferenceCountedPointer< OccurrencesImpl > |
| class | ReferenceCountedPointer< const OccurrencesImpl > |
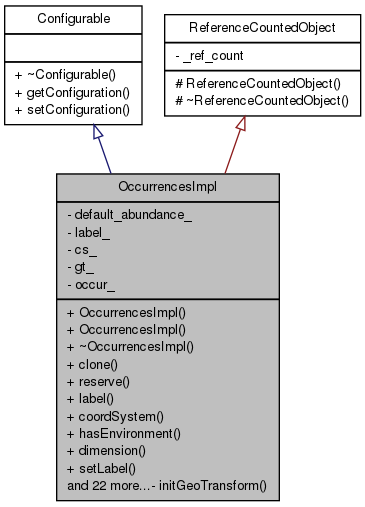
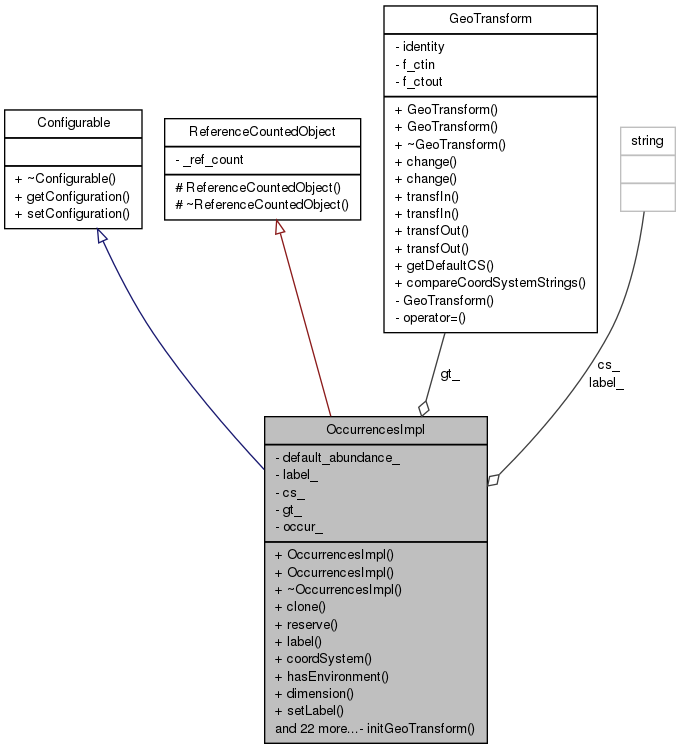
Detailed Description
Representation of a set of occurrences.
Definition at line 78 of file Occurrences.hh.
Member Typedef Documentation
| typedef std::vector<OccurrencePtr>::const_iterator OccurrencesImpl::const_iterator |
Definition at line 85 of file Occurrences.hh.
| typedef std::vector<OccurrencePtr>::iterator OccurrencesImpl::iterator |
Definition at line 86 of file Occurrences.hh.
Constructor & Destructor Documentation
| OccurrencesImpl::OccurrencesImpl | ( | double | default_abundance | ) | [inline] |
Creates a collection of occurrences points.
Definition at line 91 of file Occurrences.hh.
Referenced by clone().
| OccurrencesImpl::OccurrencesImpl | ( | const std::string & | label, |
| const std::string & | coord_system = GeoTransform::getDefaultCS() |
||
| ) | [inline] |
Creates a collection of occurrence points.
- Parameters:
-
label Label for the collection. coord_system Coordinate system of the occurrences points to be inserted in this collection (in WKT format).
Definition at line 106 of file Occurrences.hh.
Definition at line 55 of file Occurrences.cpp.
References gt_.
Member Function Documentation
| void OccurrencesImpl::appendFrom | ( | const OccurrencesPtr & | source | ) |
Appends all occurrences from source
- Parameters:
-
source Occurrences object where occurrence pointers will be appended from.
Definition at line 379 of file Occurrences.cpp.
References end(), and insert().
| const_iterator OccurrencesImpl::begin | ( | ) | const [inline] |
| iterator OccurrencesImpl::begin | ( | ) | [inline] |
Definition at line 206 of file Occurrences.hh.
| OccurrencesImpl * OccurrencesImpl::clone | ( | ) | const |
Deep copy of this.
Definition at line 312 of file Occurrences.cpp.
References cs_, end(), insert(), label_, occur_, and OccurrencesImpl().
| char const* OccurrencesImpl::coordSystem | ( | ) | const [inline] |
coordinate system name
Definition at line 129 of file Occurrences.hh.
Referenced by getConfiguration().
| void OccurrencesImpl::createOccurrence | ( | const std::string & | id, |
| Coord | longitude, | ||
| Coord | latitude, | ||
| Scalar | error, | ||
| Scalar | abundance, | ||
| int | num_attributes = 0, |
||
| Scalar * | attributes = 0, |
||
| int | num_env = 0, |
||
| Scalar * | env = 0 |
||
| ) |
Create an occurrence.
- Parameters:
-
id Unique id longitude Longitude in native coordinates latitude Latitude in native coordinates error (longitude, latitude) uncertanty in meters. abundance - the abundance of the species: 0 for absence points. num_attributes Number of possible modelling attributes. attributes Vector with possible modelling attributes. num_env Number of environment variables at sample env Vector with environment variables.
deprecated by STL vector version.
Definition at line 273 of file Occurrences.cpp.
References gt_, insert(), and GeoTransform::transfOut().
Referenced by OccurrencesReader::_addAbsence(), OccurrencesReader::_addPresence(), and setConfiguration().
| void OccurrencesImpl::createOccurrence | ( | const std::string & | id, |
| Coord | longitude, | ||
| Coord | latitude, | ||
| Scalar | error, | ||
| Scalar | abundance, | ||
| std::vector< double > | attributes, | ||
| std::vector< double > | env | ||
| ) |
Create an occurrence using STL vectors to input attributes and environment data
Definition at line 290 of file Occurrences.cpp.
References gt_, insert(), and GeoTransform::transfOut().
| int OccurrencesImpl::dimension | ( | ) | const |
Definition at line 344 of file Occurrences.cpp.
References hasEnvironment(), and occur_.
Referenced by getEnvironmentMatrix().

| void OccurrencesImpl::dump | ( | std::string | msg = "" | ) | const |
Print occurrence data and its points.
Definition at line 438 of file Occurrences.cpp.
References end(), Log::info(), Log::instance(), label_, numOccurrences(), and occur_.
| const_iterator OccurrencesImpl::end | ( | ) | const [inline] |
Definition at line 205 of file Occurrences.hh.
Referenced by appendFrom(), clone(), dump(), getConfiguration(), getEnvironmentMatrix(), getMinMax(), normalize(), resetNormalization(), and setConfiguration().
| iterator OccurrencesImpl::end | ( | ) | [inline] |
Definition at line 207 of file Occurrences.hh.
| OccurrencesImpl::iterator OccurrencesImpl::erase | ( | const iterator & | it | ) |
Remove a single entry
Definition at line 370 of file Occurrences.cpp.
References occur_, and swap().

| ConfigurationPtr OccurrencesImpl::getConfiguration | ( | ) | const [virtual] |
Implements Configurable.
Definition at line 88 of file Occurrences.cpp.
References coordSystem(), end(), gt_, label(), occur_, and GeoTransform::transfIn().
| std::vector< ScalarVector > OccurrencesImpl::getEnvironmentMatrix | ( | ) |
Return matrix as a vector of vectors (layers X respective values for each occurrence).
Definition at line 400 of file Occurrences.cpp.
References dimension(), end(), numOccurrences(), and occur_.

| void OccurrencesImpl::getMinMax | ( | Sample * | min, |
| Sample * | max | ||
| ) | const |
normalizable interface
Definition at line 251 of file Occurrences.cpp.

| ConstOccurrencePtr OccurrencesImpl::getRandom | ( | ) | const |
Choose an occurrence at random.
Definition at line 361 of file Occurrences.cpp.
References numOccurrences(), and occur_.

| bool OccurrencesImpl::hasEnvironment | ( | ) | const |
Definition at line 331 of file Occurrences.cpp.
References numOccurrences(), and occur_.
Referenced by dimension().

| void OccurrencesImpl::initGeoTransform | ( | ) | [private] |
Definition at line 74 of file Occurrences.cpp.
References cs_, GeoTransform::getDefaultCS(), and gt_.
Referenced by setConfiguration(), and setCoordinateSystem().

| void OccurrencesImpl::insert | ( | const OccurrencePtr & | oc | ) |
Add an occurrence created outside.
Definition at line 306 of file Occurrences.cpp.
References occur_.
Referenced by appendFrom(), clone(), and createOccurrence().
| bool OccurrencesImpl::isEmpty | ( | ) | const [inline] |
| char const* OccurrencesImpl::label | ( | ) | const [inline] |
label of the occurrences
Definition at line 126 of file Occurrences.hh.
Referenced by getConfiguration(), and setLabel().
| void OccurrencesImpl::normalize | ( | Normalizer * | normalizerPtr, |
| size_t | categoricalThreshold = 0 |
||
| ) |

| int OccurrencesImpl::numAttributes | ( | ) | const [inline] |
Number of attributes of the thing occurred. This is the number of dependent variables, ie the variables to be modelled.
Fixme - this is currently hard-coded to 0.
Definition at line 192 of file Occurrences.hh.
| int OccurrencesImpl::numOccurrences | ( | ) | const [inline] |
Number of occurrences.
Definition at line 195 of file Occurrences.hh.
Referenced by dump(), getEnvironmentMatrix(), getRandom(), and hasEnvironment().
| ConstOccurrencePtr OccurrencesImpl::operator[] | ( | int | i | ) | const [inline] |
Vector/Random access
Definition at line 201 of file Occurrences.hh.
| void OccurrencesImpl::reserve | ( | int | estimate | ) | [inline] |
change the reserve setting for the container
Definition at line 123 of file Occurrences.hh.
Referenced by Garp::cacheSamples().
| void OccurrencesImpl::resetNormalization | ( | ) |
Reset normalization
Definition at line 236 of file Occurrences.cpp.

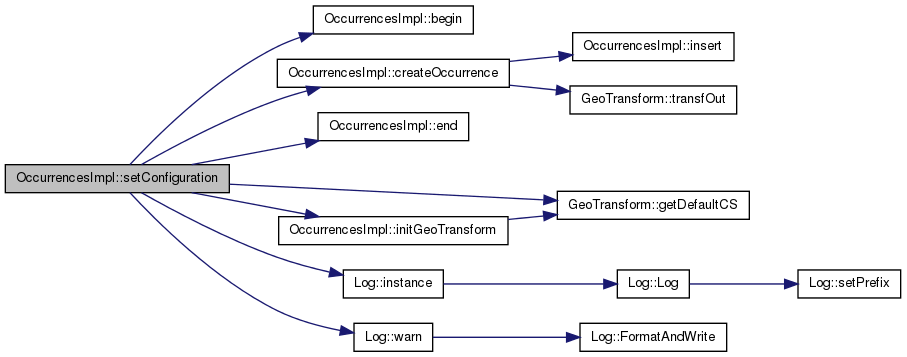
| void OccurrencesImpl::setConfiguration | ( | const ConstConfigurationPtr & | config | ) | [virtual] |
Implements Configurable.
Definition at line 128 of file Occurrences.cpp.
References begin(), createOccurrence(), cs_, default_abundance_, end(), GeoTransform::getDefaultCS(), initGeoTransform(), Log::instance(), label_, UNUSED, and Log::warn().
| void OccurrencesImpl::setCoordinateSystem | ( | const std::string & | cs | ) |
set the coordinate system
All occurrences inserted after this call are assumed to be in this coordinate system.
Definition at line 67 of file Occurrences.cpp.
References cs_, and initGeoTransform().

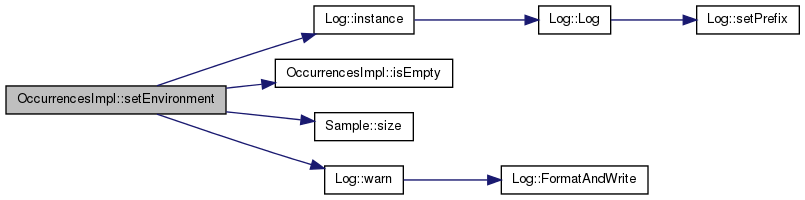
| void OccurrencesImpl::setEnvironment | ( | const EnvironmentPtr & | env, |
| const char * | type = "Sample" |
||
| ) |
Sets environment object in each occurrence object
Definition at line 181 of file Occurrences.cpp.
References Log::instance(), isEmpty(), occur_, Sample::size(), and Log::warn().
| void OccurrencesImpl::setLabel | ( | const std::string & | label | ) |
set the label
Definition at line 61 of file Occurrences.cpp.
References label(), and label_.

Friends And Related Function Documentation
friend class ReferenceCountedPointer< const OccurrencesImpl > [friend] |
Definition at line 81 of file Occurrences.hh.
friend class ReferenceCountedPointer< OccurrencesImpl > [friend] |
Definition at line 80 of file Occurrences.hh.
Member Data Documentation
std::string OccurrencesImpl::cs_ [private] |
Definition at line 249 of file Occurrences.hh.
Referenced by clone(), initGeoTransform(), setConfiguration(), and setCoordinateSystem().
double OccurrencesImpl::default_abundance_ [private] |
Definition at line 246 of file Occurrences.hh.
Referenced by setConfiguration().
GeoTransform* OccurrencesImpl::gt_ [private] |
Definition at line 251 of file Occurrences.hh.
Referenced by createOccurrence(), getConfiguration(), initGeoTransform(), and ~OccurrencesImpl().
std::string OccurrencesImpl::label_ [private] |
Definition at line 248 of file Occurrences.hh.
Referenced by clone(), dump(), setConfiguration(), and setLabel().
std::vector< OccurrencePtr > OccurrencesImpl::occur_ [private] |
Definition at line 253 of file Occurrences.hh.
Referenced by clone(), dimension(), dump(), erase(), getConfiguration(), getEnvironmentMatrix(), getMinMax(), getRandom(), hasEnvironment(), insert(), normalize(), resetNormalization(), and setEnvironment().
The documentation for this class was generated from the following files:
